Appearance
Influence des conditions initiales, équations différentielles linéaires
Plan :
- Continuité par rapport aux données initiales
- Équations différentielles linéaires : existence et unicité globales
- La résolvante
1) Continuité par rapport aux données initiales
Soit $f: J \times \Omega \rightarrow \mathbb{R}^n$ continue et semi-lipschitzienne. Soit $(t_0, x_0) \in J \times \Omega$. D'après le théorème de Cauchy-Lipschitz, il existe une unique solution maximale de :
$$\begin{cases} x'(t) = f(t, x(t)) \\ x(t_0) = x_0 \end{cases}\quad\textcolor{blue}{(*)} $$
On veut savoir comment cette solution maximale, et son domaine de définition, dépendent de la condition initiale.
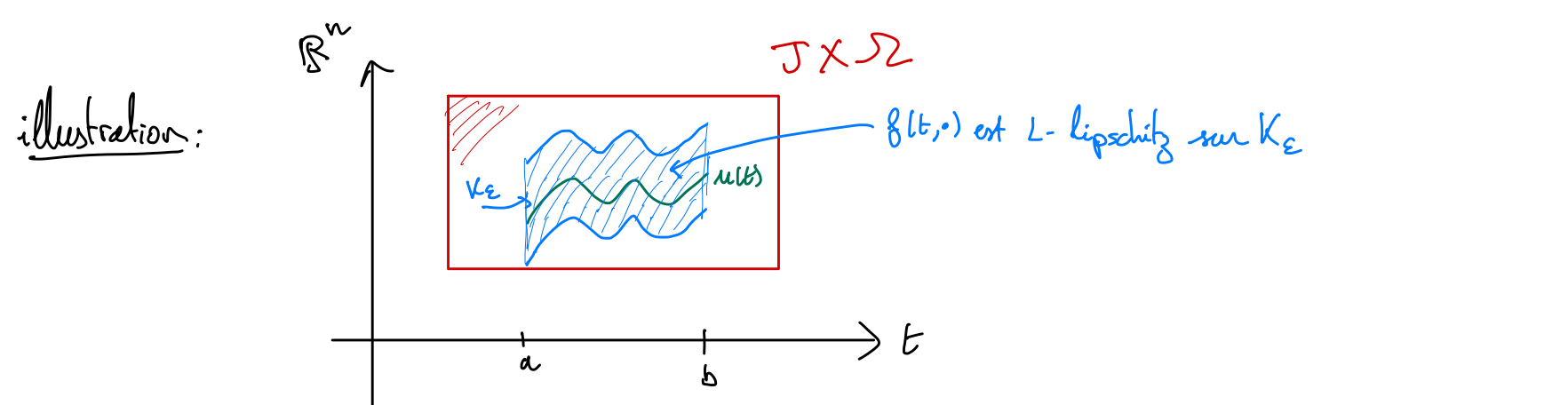
Définition : Soit $u : [a, b] \rightarrow \Omega$ la restriction d'une solution de $\textcolor{blue}{(*)}$ à un sous-intervalle compact de son intervalle de définition. Le graphe de $u$ est :
$$K(u) = \{ (t, u(t)) : t \in [a, b] \} \subset J \times \Omega $$
Pour $\varepsilon > 0$, le $\varepsilon$-tube autour de $K(u)$ est défini par :
$$K_\varepsilon(u) = \{ (t, y) \mid t \in [a, b], \|y - u(t)\| \le \varepsilon \} \subset J \times \mathbb{R}^n $$

Lemme : $\exists\varepsilon > 0$ tel que :
$K_\varepsilon(u)$ est un compact inclus dans $J \times \Omega$.
$\exists L \ge 0$ tel que si $(t, x) \in K_\varepsilon(u)$ et $(t, y) \in K_\varepsilon(u)$, alors
$$\|f(t, x) - f(t, y)\| \le L \|x - y\| $$
Preuve :
Pour simplifier les notations, on pose $K = K(u)$ et $K_\varepsilon = K_\varepsilon(u)$.
On munit $\mathbb{R} \times \mathbb{R}^n$ de la distance $d((t, x), (s, y)) = |t - s| + \|x - y\|$. $K$ est compact comme image d'un compact $[a, b]$ par l'application continue $t \mapsto (t, u(t))$. $K_\varepsilon$ étant fermé borné, il est compact. Comme $K \subset J \times \Omega$, on a $d(K, (J \times \Omega)^c) > 0$. Par compacité, on peut trouver $\varepsilon > 0$ assez petit tel que $d(K_\varepsilon, (J \times \Omega)^c) > 0$, donc $K_\varepsilon \subset J \times \Omega$.
Si $f$ est de classe $\mathcal{C}^1$, on a immédiatement
$$\|f(t, x) - f(t, y)\| \le \sup_{K_\varepsilon} \|\partial_x f\| \cdot \|x - y\| $$
Dans le cas général, il faut être plus fin. Par hypothèse semi-lipschitzienne, pour tout $m = (t, x) \in K_\varepsilon$, on peut trouver :
un intervalle ouvert $I(m)$ contenant $t$ (pas forcément inclus dans $[a, b]$),
une boule fermée $\overline{B}(x, 2r(m))$ incluse dans $\Omega$,
$L(m) > 0$ telle que
$$\forall (t, x), (t, y) \in I(m) \times \overline{B}(x, 2r(m)), \quad \|f(t, x) - f(t, y)\| \le L(m) \|x - y\| $$
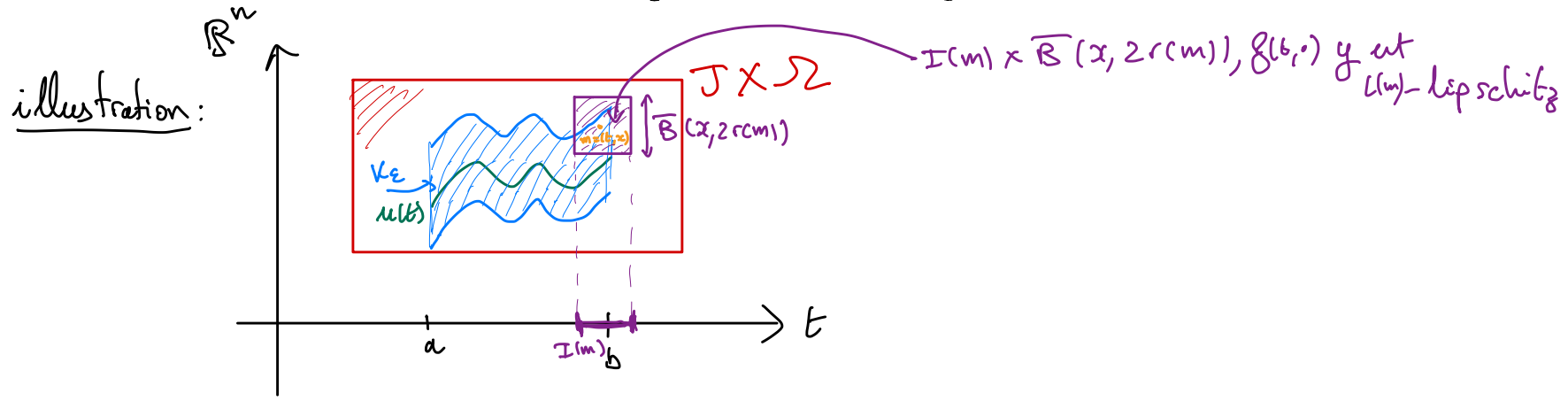
On a un recouvrement ouvert de $K_\varepsilon$ :
$$K_\varepsilon \subset \bigcup_{m \in K_\varepsilon} I(m) \times B(x, r(m)) $$
Par compacité de $K_\varepsilon$, on peut en extraire un sous-recouvrement fini :
$$K_\varepsilon \subset \bigcup_{i=1}^p I(m_i) \times B(x_i, r(m_i)) \quad \text{avec } m_i = (t_i, x_i) \in K_\varepsilon $$
Posons $l = \max\limits_{1 \le i \le p} L(m_i)$, $r = \min\limits_{1 \le i \le p} r(m_i)$ et $M = \sup\limits_{K_\varepsilon} \|f\|$.
Soient $(t, x)$ et $(t, y) \in K_\varepsilon$.
Cas 1 : $\|x - y\| < r$. Alors il existe $i \le p$ tel que $(t, x) \in I(m_i) \times B(x_i, r(m_i))$. On montre alors que $(t, y) \in I(m_i) \times \overline{B}(x_i, 2r(m_i))$. Donc :
$$\|f(t, x) - f(t, y)\| \le L(m_i) \|x - y\| \le l \|x - y\| $$
Cas 2 : $\|x - y\| \ge r$. Alors :
$$\|f(t, x) - f(t, y)\| \le 2M \le \frac{2M}{r} \|x - y\| $$
Ainsi, $L = \max\left(l, \frac{2M}{r}\right)$ convient.
Rappel : Lemme de Grönwall Soit $g : I \rightarrow \mathbb{R}_+$ une fonction continue et $t_0 \in I$. On suppose qu'il existe $C_0, c \ge 0$ t.q.
$$g(t) \le C_0 + c \int_{t_0}^t g(s) \, ds, \quad \forall t \in I, t \ge t_0 $$
Alors
$$g(t) \le C_0 e^{c(t - t_0)}, \quad \forall t \in I, t \ge t_0 $$
Théorème (Dépendance continue des solutions par rapport aux conditions initiales) : Soit $f : J \times \Omega \rightarrow \mathbb{R}^n$ continue semi-lipschitzienne. Soit $u : [a, b] \rightarrow \Omega$ la restriction d'une solution de $x'(t) = f(t, x(t))$ (condition initiale quelconque dans $J\times\Omega$) à un sous-intervalle compact $[a,b]$ de son domaine de définition. Soit $\varepsilon > 0$ tel que $K_\varepsilon(u) \subset J \times \Omega$.
Il existe $\eta \in ]0,\varepsilon[$ tel que si $y$ est une solution maximale de
$$\begin{cases} y'(t) = f(t, y(t)) \\ y(t_0) = y_0 \end{cases} \quad \text{avec } (t_0, y_0) \in K_\eta(u) $$
alors :
$y$ est définie sur un intervalle contenant $[a, b]$.
$\forall t \in [a, b]$, $(t, y(t)) \in K_\varepsilon(u)$, c'est-à-dire
$$\sup_{t \in [a, b]} \|u(t) - y(t)\| \le \varepsilon $$
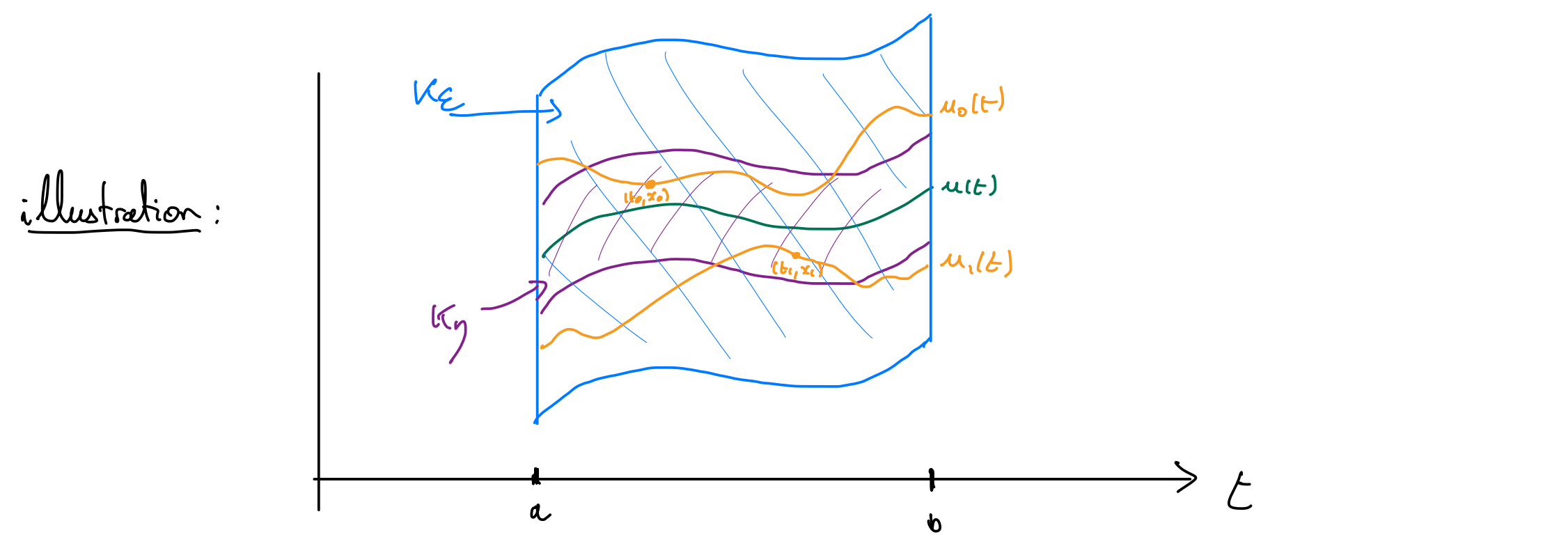
$\exists M, L > 0$ tels que si $y_0$ et $y_1$ sont les solutions sur $[a,b]$ de
$$\begin{align*}&\begin{cases} x'(t) = f(t, x(t)) \\ x(t_0) = x_0 \end{cases} &&\begin{cases} x'(t) = f(t, x(t)) \\ x(t_1) = x_1 \end{cases}\end{align*} $$
avec $(t_0,x_0)\in K_\eta(u)$ et $(t_1,x_1)\in K_\eta(u)$, alors
$$\forall t\in[a,b],\quad\|y_1(t) - y_0(t)\| \le \left( \|x_1 - x_0\| + M |t_1 - t_0| \right) e^{L|t - t_0|} $$
En particulier, si $t_1 = t_0$, on a :
$$\forall t\in I,\quad\|y_1(t) - y_0(t)\| \le \|x_1 - x_0\| e^{L|t - t_0|} $$
Preuve :
Pour simplifier, on pose $K = K(u)$ et $K_\varepsilon = K_\varepsilon(u)$. Soit $L > 0$ tel que si $(t,x)\in K_{\varepsilon}$ et $(t,y)\in K_{\varepsilon}$, $\|f(t,x)-f(t,y)\|\leq L\|x-y\|$ (lemme précédent). On montre le résultat avec $\eta<\varepsilon e^{-L(b-a)}$.
Preuve de 1. et 2. Soit $y:I\to \Omega$ une solution maximale de
$$\begin{cases} y'(t) = f(t, y(t)) \\ y(t_0) = x_0 \end{cases} \quad \text{avec } (t_0, x_0) \in K_\eta $$
On travaille dans le futur de $t_0$ (même raisonnement dans le passé)
Étape 1 : On montre que $t \in [t_0, b] \cap I \implies \|u(t) - y(t)\| < \varepsilon$. Si ce n'est pas le cas, soit $t_1 = \inf \{ t \in [t_0, b] \cap I : \|u(t) - y(t)\| \geq \varepsilon \}$. Ainsi $\|u(t_1) - y(t_1)\| = \varepsilon$ et $\|u(t) - y(t)\| \le \varepsilon$ pour $t_0 \le t < t_1$, de sorte que $(t,y(t))\in K_{\varepsilon}$, et clairement $(t,u(t))\in K_{\varepsilon}$. Ainsi, pour $t_0 \le t \le t_1$,
$$\|u(t) - y(t)\| \le \|u(t_0) - y(t_0)\| + \int_{t_0}^t \|f(s, u(s)) - f(s, y(s))\| \, ds \le \eta + L \int_{t_0}^t \|u(s) - y(s)\| \, ds $$
Donc par Grönwall, $\|u(t_1) - y(t_1)\| \le \eta e^{L(t_1 - t_0)} \le \eta e^{L(b-a)} < \varepsilon$, ce qui est absurde.
Étape 2 : Par l'absurde, supposons que $\sup I \le b$. D'après ce qui précède, $\forall t \in [t_0, \sup I[$, $y(t) \in p(K_\varepsilon)$ où $p: (t, x) \mapsto x$. $p(K_\varepsilon)\subset\Omega$ est compact comme image de $K_\varepsilon$ par $p$ continue. Cela contredit le lemme de sortie définitive de tout compact.
Preuve de 3. Par définition, $\forall t\in[a,b]$, $y_0(t) = x_0 + \int_{t_0}^t f(s,y_0(s))\, ds$ et $y_1(t) = x_1 + \int_{t_1}^t f(s,y_1(s))\, ds$. Donc
$$\begin{align*}\|y_1(t) - y_0(t)\| &\le \|x_1 - x_0\| + \left\| \int_{t_1}^t f(s, y_1(s)) \, ds - \int_{t_0}^t f(s, y_0(s)) \, ds \right\|\\ &\le \|x_1 - x_0\| + \left\| \int_{t_1}^{t_0} f(s, y_1(s)) \, ds \right\| + \int_{t_0}^t \|f(s, y_1(s)) - f(s, y_0(s))\| \, ds\end{align*} $$
En notant $M = \sup\limits_{K_\varepsilon} \|f\|$, on a donc
$$\|y_1(t)-y_0(t)\|\leq\|x_1-x_0\|+M|t_1-t_0|+L\int_{t_0}^t \|y_1(s)-y_0(s)\|\,ds $$
On conclut avec le lemme de Grönwall.
Corollaire : Soit $(t_n, x_n) \in J\times\Omega$ avec $(t_n,x_n)\rightarrow(t_0,x_0)$. Notons $u_0$, $u_n$ les solutions des problèmes
$$\begin{cases} x'(t) = f(t, x(t)) \\ x(t_0) = x_0 \end{cases}\quad\quad \begin{cases} x'(t) = f(t, x(t)) \\ x(t_n) = x_n \end{cases} $$
définies sur un même intervalle borné. Alors $\lim\limits_{n \rightarrow \infty} \|u_n - u\|_\infty = 0$.
Proposition (Variations de la fonction) : Soient $f, g : J \times \Omega \rightarrow \mathbb{R}^n$ t.q. $\|f - g\|_\infty \le \varepsilon$. Soit $I\subset J$ tel que les solutions $u$, $v$ de
$$\begin{align*}&\begin{cases} x'(t) = f(t, x(t)) \\ x(t_0) = x_0 \end{cases} &&\begin{cases} x'(t) = g(t, x(t)) \\ x(t_0) = x_0 \end{cases}\end{align*} $$
sont définies sur $I$. Alors $\forall t\in I,\quad\|u(t) - v(t)\| \le \varepsilon |t - t_0| e^{L|t - t_0|}$.
En utilisant les mêmes idées, on démontre le résultat :
Continuité par rapport à des paramètres (Admis) : Soit $\Lambda \subset \mathbb{R}^k$ un ouvert (espaces des paramètres). Soit $f: J \times \Omega \times \Lambda \rightarrow \mathbb{R}^n$ continue, localement lipschitzienne par rapport aux $2^{\text{e}}$ et $3^{\text{e}}$ variables. Alors $\forall (t_0,x_0,\varepsilon_0)\in J\times\Omega\times\Lambda$, $\exists W$ voisinage de $\varepsilon_0$ tel que $\forall \varepsilon\in W$ les problèmes de Cauchy
$$\begin{cases} x'(t) = f(t, x(t),\varepsilon) \\ x(t_0) = x_0 \end{cases} \quad\text{et}\quad \begin{cases} x'(t) = f(t, x(t), \varepsilon_0) \\ x(t_0) = x_0 \end{cases} $$
admettent deux solutions $u_\varepsilon$ et $u_{\varepsilon_0}$ définies sur un même intervalle borné, et de plus $\|u_{\varepsilon}-u_{\varepsilon_0}\|\xrightarrow[\varepsilon\to\varepsilon_0]{}0$.
2) Équations différentielles linéaires : existence et unicité globales
Dans ce cadre, on s'intéresse au problème de Cauchy :
$$\begin{cases} x'(t) = A(t)x(t) + b(t) \\ x(t_0) = x_0 \end{cases} $$
où :
- $J \subset \mathbb{R}$ est un intervalle ouvert
- $A : J \rightarrow \mathcal{M}_n(\mathbb{R})$ est une application de classe $\mathcal{C}^k$ ($k\in\{0,1,2,\dots,\infty\}$)
- $b : J \rightarrow \mathbb{R}^n$ est de classe $\mathcal{C}^k$
- $t_0\in J$, $x_0\in\mathbb{R}^n$
Ici $f:J\times\mathbb{R}^n\rightarrow\mathbb{R}^n$ avec $f(t,x) = A(t)x+b(t)$
Lorsque $b\equiv 0$ est la fonction nulle, on parle d'équation linéaire homogène.
Théorème (Cauchy-Lipschitz linéaire) : Soient $t_0 \in J$, $x_0 \in \mathbb{R}^n$. L'unique solution maximale $u:]t_-,t_+[\rightarrow\mathbb{R}^n$ du problème de Cauchy $\begin{cases}x'(t) = A(t)x(t)+b(t)\\ x(t_0) = x_0\end{cases}$ est globale, c'est-à-dire que $]t_-,t_+[ = J$.
⚠️ Le fait que toutes les solutions maximales soient globales est une propriété spécifique aux équations linéaires.
Preuve :
On vérifie le critère de sous-linéarité.
On utilise la norme matricielle $\|A\| = \sup\limits_{x \neq 0} \dfrac{\|Ax\|}{\|x\|} = \sup\limits_{\|x\|=1}\|Ax\|$ qui vérifie $\|Ax\|\leq \|A\|\|x\|$, $\forall x\neq0$.
On pose $f(t, x) = A(t)x + b(t)$, continue.
Vérifions que $f$ est semi-lipschitzienne. Soit $(t_0,x_0)\in J\times\mathbb{R}^n$. Soit $\eta>0$. Pour $|t-t_0|<\eta$, $x,y\in\overline B(x_0,\eta)$ on a
$$\|f(t,x)-f(t,y)\|=\|A(t)(x-y)\|\leq\underbrace{\sup_{t\in[t_0-\eta,t_0+\eta]}\|A(t)\|}_{<\infty\text{ par continuit\'e de }A}\cdot\|x-y\| $$
Les hypothèses du théorème de Cauchy-Lipschitz sont donc satisfaites.
Vérifions le critère de sous-linéarité : Soit $K \subset J$ compact. Pour $t\in K$, $x\in\mathbb{R}^n$, on a
$$\|f(t, x)\| \leq \|A(t)\|\cdot\|x\|+\|b(t)\|\le C_1 \|x\| + C_2 $$
avec $C_1 = \sup\limits_{t\in K}\|A(t)\|$ et $C_2 = \sup_{t\in K}\|b(t)\|$, où $C_1<\infty$ et $C_2<\infty$ par continuité.
3) La résolvante
On se place dans le cas homogène : $x'(t) = A(t)x(t)$. Notons $\mathcal{E}$ l'ensemble de ses solutions (pour toutes les conditions initiales possibles).
Proposition : $\mathcal{E}$ est un sous-espace vectoriel de $\mathcal{C}^1(J, \mathbb{R}^n)$ de dimension $n$.
Preuve :
Il est clair que $\mathcal E$ est un sous-espace vectoriel de $\mathcal{C}^1(J, \mathbb{R}^n)$.
Fixons $t_0 \in J$ et posons
$$T_{t_0} : \mathcal{E} \rightarrow \mathbb{R}^n, \quad f \mapsto f(t_0),\quad\text{lin\'eaire}. $$
D'après le théorème de Cauchy-Lipschitz linéaire, $T_{t_0}$ est surjective (existence) et injective (unicité). Donc $T_{t_0}$ est un isomorphisme d'espaces vectoriels, d'où $\dim(\mathcal{E}) = \dim(\mathbb{R}^n) = n$.
Proposition : Soient $u_1, \dots, u_n \in \mathcal{E}$. Il y a équivalence entre :
- $(u_1, \dots, u_n)$ est une base de $\mathcal{E}$.
- $\forall t_0 \in J$, $(u_1(t_0), \dots, u_n(t_0))$ est une base de $\mathbb{R}^n$.
- $\exists t_0 \in J$, $(u_1(t_0), \dots, u_n(t_0))$ est une base de $\mathbb{R}^n$.
Remarque : Si $u_1,\dots,u_n$ est une base de $\mathcal E$, alors pour toute fonction $u$ telle que $u'(t) = A(t)u(t)$, il existe $\lambda_1,\dots,\lambda_n\in\mathbb{R}$ tels que $\forall t\in J$ on a $u(t)=\lambda_1 u_1(t)+\cdots+\lambda_n u_n(t)$.
Définition : Soit $(u_1, \dots, u_n)$ une base de $\mathcal{E}$. On appelle la matrice wronskienne associée à $(u_1,\dots,u_n)$ la matrice
$$W(t) = \big( u_1(t) \,\, \dots\,\, u_n(t) \big) \in \mathcal{M}_n(\mathbb{R}) $$
On vérifie que $W(t)$ est inversible pour tout $t \in J$ et vérifie $W'(t) = A(t)W(t)$, $\forall t\in J$.
Définition : Soit $t_0 \in J$. Notons $u_1(t, t_0), \dots, u_n(t, t_0)$ les solutions du problème de Cauchy
$$\begin{cases}x'(t)=A(t)x(t) \\ x(t_0)=e_i\end{cases}\quad\quad\text{avec }(e_1,\dots,e_n) \text{ base canonique de }\mathbb{R}^n $$
La matrice
$$R_A(t, t_0) = \begin{pmatrix} u_1(t, t_0) & \dots & u_n(t, t_0) \end{pmatrix} \in \mathcal{M}_n(\mathbb{R}) $$
est appelée matrice résolvante.
C'est la matrice wronskienne dans une base particulière.
Proposition : Soit $t_0 \in J$. On a :
$$\begin{cases}\dfrac{d}{dt} R_A(t, t_0) = A(t) R_A(t, t_0)\\ R_A(t_0,t_0) = I_n\quad(\text{matrice identit\'e de }\mathbb{R}^n)\end{cases} $$
Si $A$ est de classe $\mathcal{C}^k$, $t\mapsto R_A(t,t_0)$ est de classe $\mathcal{C}^{k+1}$. En particulier, $u(t) = R_A(t,t_0)x_0$ est la solution de $\begin{cases}x'(t)=A(t)x(t)\\ x(t_0)=x_0\end{cases}$.
Preuve :
$R_A(t_0,t_0) = (e_1,\dots,e_n) = I_n$
Le fait que $\dfrac{d}{dt} R_A(t,t_0) = A(t)R_A(t,t_0)$ provient du fait que $t\mapsto R_A(t,t_0)$ est la matrice wronskienne associée à la base $(\zeta_1,\dots,\zeta_n)$.
Ainsi, en posant $u(t) = R(t,t_0)x_0$ : on a bien $u(t_0) = I_n x_0 = x_0$ et
$$u'(t) = \frac{d}{dt}R(t,t_0)x_0 = A(t)R(t,t_0)x_0 = A(t)u(t). $$
Proposition : On a
- $\forall t_0, t_1, t_2 \in J, \quad R_A(t_2, t_0) = R_A(t_2, t_1) R_A(t_1, t_0)$
- $\forall t_0, t_1 \in J, \quad R_A(t_0, t_1)^{-1} = R_A(t_1, t_0)$
Preuve :
Soient $t_0,t_1\in J$, $x_0\in\mathbb{R}^{n}$. On pose $u(t) = R_A(t,t_0)x_0$, $v(t) = R_A(t,t_1)R_A(t_1,t_0)x_0$ pour $t\in J$. Il suffit de montrer que $u=v$.
$u(t_1) = R_A(t_1,t_0)x_0$ et $v(t_1) = I_n R_A(t_1,t_0)x_0$
$u$ et $v$ sont solutions de $x'(t) = A(t)x(t)$ :
$$u'(t)=\frac{d}{dt}R_A(t,t_0)x_0 = A(t)R_A(t,t_0)x_0 = A(t)u(t) $$
$$v'(t)=\frac{d}{dt}R_A(t,t_1)R_A(t_1,t_0)x_0 = A(t)R_A(t,t_1)R_A(t_1,t_0)x_0 = A(t)v(t) $$
Donc $u=v$.
On prend $t_2 = t_0$.
Exemple (n=1) : Dans le cas $A(t) = a(t) \in \mathbb{R}$, l'équation devient $x'(t) = a(t)x(t)$. Ainsi,
$$R(t, t_0) = \exp\left( \int_{t_0}^t a(s) \, ds \right) $$
Cependant, en général (pour $n \ge 2$), il est rare de pouvoir donner une expression explicite de la résolvante. On verra en revanche que l'on peut obtenir des informations qualitatives sur les solutions grâce à l'étude de la résolvante.
Rappel : Pour $t\in T$, $R_A(t,t_0)\in M_n(\mathbb{R})$ vérifie $\begin{cases}\dfrac{d}{dt}R_A(t,t_0) = A(t)R_A(t,t_0)\\ R_A(t_0,t_0) = I_n\end{cases}$
Proposition (Formule de Liouville) : Soit $t_0\in\mathbb{R}$. La fonction $\Delta(t) = \det R_A(t, t_0)$ vérifie l'équation différentielle
$$\begin{cases}\Delta'(t) = \mathrm{tr}(A(t))\Delta(t)\\ \Delta(t_0) = 1\end{cases} $$
Ce qui implique $\det R_A(t,t_0) = \exp\left( \int_{t_0}^t \mathrm{tr}(A(s)) \, ds \right)$.
Preuve :
Vérifions que pour $R\in GL_n(\mathbb{R})$ la différentielle de $\det:M_n(\mathbb{R})\to\mathbb{R}$ vaut
$$D_R\det(H) = \det(R)\,\mathrm{tr}(R^{-1}H)\quad\text{pour }H\in M_n(\mathbb R) $$
On sait que $\det$ est différentiable comme fonction polynomiale. Alors
$$D_R\det (H) = \lim_{t\to 0}\frac{\det(R+tH)-\det{R}}{t} $$
Or $\det(R+tH) = \det(R)\det(I_n+tR^{-1}H)$. En notant $\lambda_1,\dots,\lambda_n$ les valeurs propres complexes de $R^{-1}H$, on a
$$\begin{align*}\det(I_n+tR^{-1}H) &= \prod_{i=1}^n (1+t\lambda_i)\\ &=1+\left(\sum_{i=1}^n\lambda_i\right)t+o(t^2)\\&=1+t\,\mathrm{tr}(R^{-1}H) + o(t^2).\end{align*} $$
Donc
$$\frac{\det(R+tH)-\det{R}}{t}\xrightarrow[t\to 0]{}\det{R}\,\mathrm{tr}(R^{-1}H) $$
d'où le résultat.
Ainsi, par composition
$$\begin{align*}\Delta'(t)&=D_{R_A(t,t_0)}\left(\frac{d}{dt}R_A(t,t_0)\right)\\&=\det R_A(t,t_0)\times\mathrm{tr}\left(R_A(t,t_0)^{-1}A(t)R_A(t,t_0)\right)\\&=\Delta(t)\,\mathrm{tr}(A(t)).\end{align*} $$
Remarque : Une matrice wronskienne $W(t)$ vérifie $W'(t) = A(t)W(t)$, et on en déduit avec la même preuve qu'en notant $\Delta_W(t) = \det{W(t)}$ on a $\Delta_W'(t) = \mathrm{tr}(W(t))\Delta_W(t)$, $\forall t\in J$.
Exemple : Résolvons $\begin{cases} x' = -x \tan t + y \\ y' = x + y \tan t \end{cases}$ sur $J = \left]-\frac{\pi}{2}, \frac{\pi}{2}\right[$. On a $A(t) = \begin{pmatrix} -\tan t & 1 \\ 1 & \tan t \end{pmatrix}$. On remarque que $u_1(t) = \begin{pmatrix} 1 \\ \tan t \end{pmatrix}$ est solution. Comment trouver une autre solution ? Idée : utiliser $\mathrm{tr}(A) = 0$. Supposer que $u_2(t) = \begin{pmatrix}x(t)\\y(t)\end{pmatrix}$ est une solution linéairement indépendante. Alors
$$W(t) = \begin{pmatrix}1 &x(t)\\\tan t &y(t)\end{pmatrix}\quad\det W(t) = y(t)-\tan t \cdot x(t) = c $$
Donc $y(t) = x(t)\tan t + c = y(t) - x'(t) + c$. Donc $x'(t) = c$. Donc $x(t) = ct+b$. Donc $y(t) = ct\tan t+b\tan t + c$. On prend $b=0$, $c=1$. Donc $\begin{pmatrix}x(t)\\y(t)\end{pmatrix} = \begin{pmatrix}t\\ t\tan t+1\end{pmatrix}$.
Corollaire : Si $\forall t\in\mathbb{R}$, on a $\mathrm{tr}(A(t)) = 0$, alors $\forall s,t\in J$, $\det R_A(t,s) = 1$.
Il est possible d'interpréter cela comme le fait que l'équation différentielle "conserve les volumes".
Proposition : On suppose que $\forall t \in J$, $A(t)$ est antisymétrique (${}^tA(t) = -A(t)$). Alors
- $\forall t, s \in J$, $R_A(t, s)$ est une matrice orthogonale ($\det R_A(t,s) = 1$ et ${}^t R_A(t,s)R_A(t,s) = I_n$).
- Si $x$ est solution, $\forall t \in J$, $\|x(t)\| = \|x(t_0)\|$.
Preuve :
On sait déjà que $\det R_A(t,s) = 1$. D'autre part :
$$\begin{align*}\frac{d}{dt}\left({}^t R_A(t,s)R_A(t,s)\right)&=\frac{d}{dt}\left({}^t R_A(t,s)\right)R_A(t,s) + {}^t R_A(t,s)\frac{d}{dt}R_A(t,s)\\&={}^tR_A(t,s)\,{}^tA(t)R_A(t,s)+{}^t R_A(t,s)A(t)R_A(t,s)\\&={}^t R_A(t,s)\left({}^tA(t)+A(t)\right)R_A(t,s)\\&=0.\end{align*} $$
Donc ${}^tR_A(t,s)R_A(t,s)$ est constant, et pour $t=s$ vaut $I_n$.
On a
$$\|x(t)\|^2 = \|R(t,t_0)x(t_0)\|^2 = {}^tx(t_0)\,{}^t R(t,t_0)R(t,t_0)x(t_0) = {}^t x(t_0)x(t_0)=\|x(t_0)\|^2 $$